ray.h File Reference
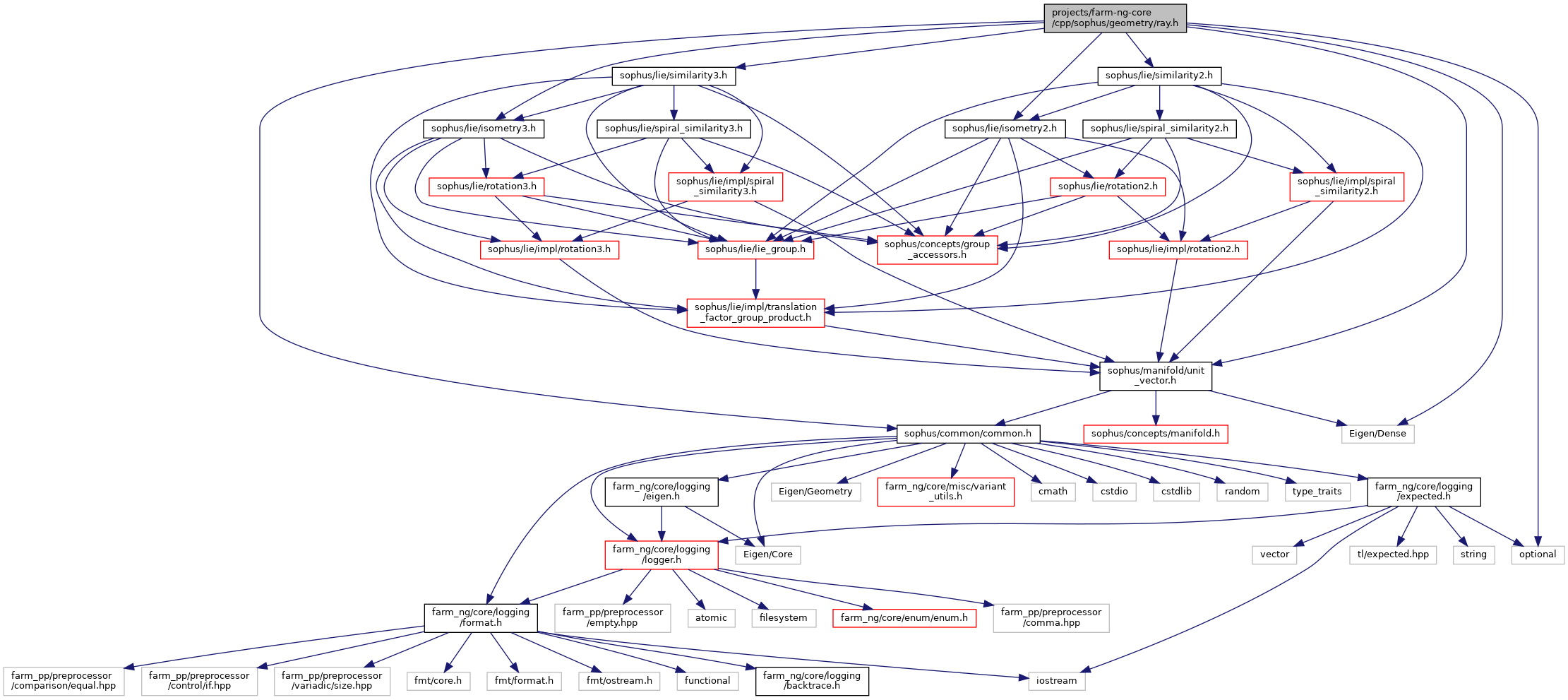
#include "sophus/common/common.h"#include "sophus/lie/isometry2.h"#include "sophus/lie/isometry3.h"#include "sophus/lie/similarity2.h"#include "sophus/lie/similarity3.h"#include "sophus/manifold/unit_vector.h"#include <Eigen/Dense>#include <optional>
Include dependency graph for ray.h:
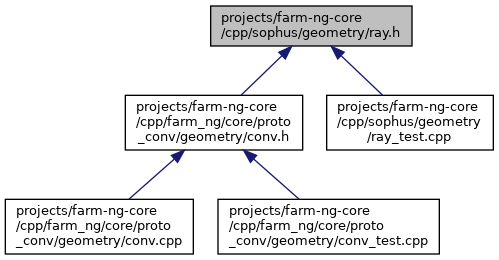
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | sophus::Ray< TScalar, kN > |
| class | sophus::Ray< TScalar, kN > |
| struct | sophus::Ray< TScalar, kN >::IntersectionResult |
| struct | sophus::ClosestApproachResult< TT > |
Namespaces | |
| sophus | |
| Image MutImage, owning images types. | |
Typedefs | |
| template<class TScalar > | |
| using | sophus::Ray2 = Ray< TScalar, 2 > |
| template<class TScalar > | |
| using | sophus::Ray3 = Ray< TScalar, 3 > |
| using | sophus::Ray2F64 = Ray2< double > |
| using | sophus::Ray3F64 = Ray3< double > |
Functions | |
| template<class TT > | |
| auto | sophus::operator* (Isometry2< TT > const &bar_from_foo, Ray< TT, 2 > const &ray_foo) -> Ray< TT, 2 > |
| template<class TT > | |
| auto | sophus::operator* (Isometry3< TT > const &bar_from_foo, Ray< TT, 3 > const &ray_foo) -> Ray< TT, 3 > |
| template<class TT > | |
| auto | sophus::operator* (Isometry3< TT > const &bar_from_foo, UnitVector< TT, 3 > const &v_foo) -> Ray< TT, 3 > |
| template<class TT > | |
| auto | sophus::operator* (Similarity2< TT > const &b_from_a, Ray2< TT > const &ray_a) -> Ray2< TT > |
| template<class TT > | |
| auto | sophus::operator* (Similarity3< TT > const &b_from_a, Ray3< TT > const &ray_a) -> Ray3< TT > |
| template<class TT > | |
| auto | sophus::closestApproachParameters (Ray3< TT > const &line_0, Ray3< TT > const &line_1) -> std::optional< ClosestApproachResult< TT >> |
| For two parametric lines in lambda0 and lambda1 respectively,. More... | |
| template<class TT > | |
| auto | sophus::closestApproach (Ray3< TT > const &line_0, Ray3< TT > const &line_1) -> std::optional< Eigen::Vector3< TT >> |
For two lines line_0 and line_1 returns the mid-point of the line segment connecting one point from each of the lines which are closest to one another according to the l2 distance measure. More... | |
