rotation3.h File Reference
#include "sophus/concepts/group_accessors.h"#include "sophus/lie/impl/rotation3.h"#include "sophus/lie/lie_group.h"#include "sophus/linalg/orthogonal.h"
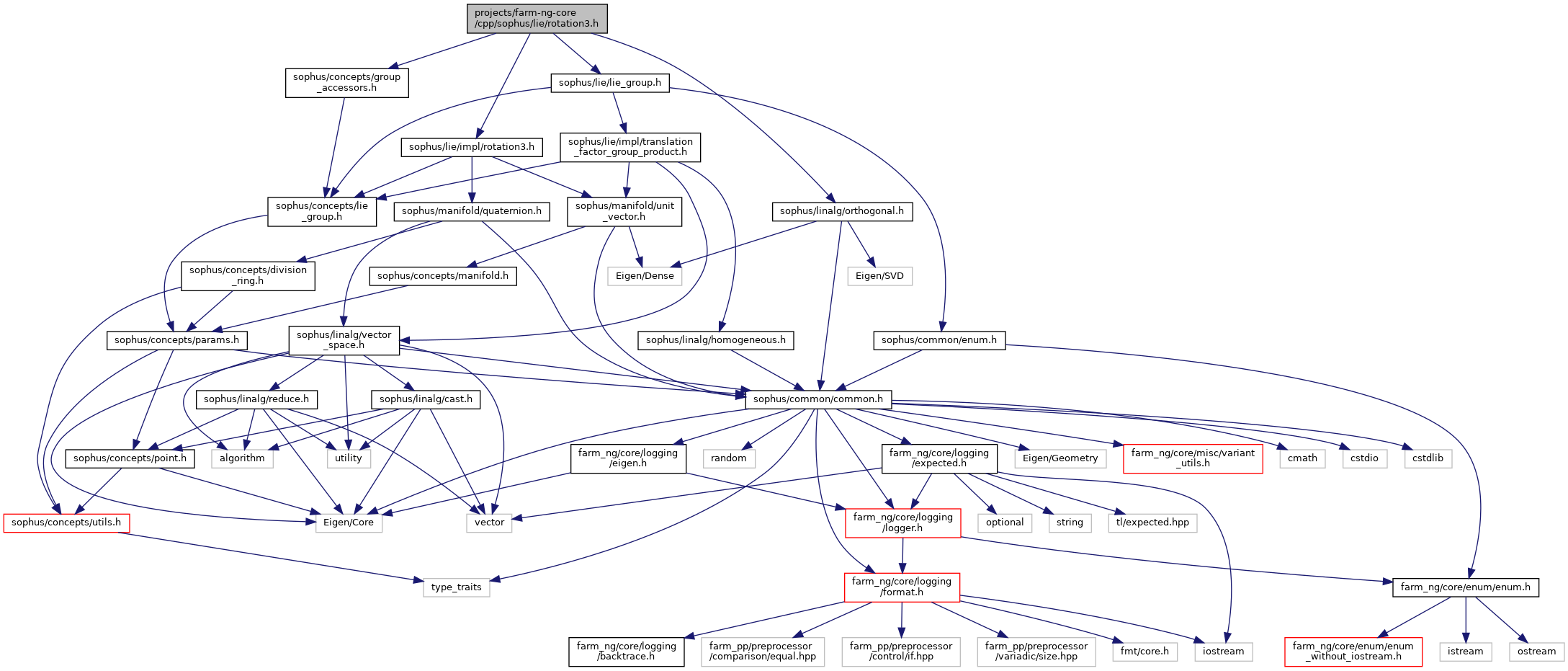
Include dependency graph for rotation3.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | sophus::Rotation3< TScalar > |
Namespaces | |
| sophus | |
| Image MutImage, owning images types. | |
Typedefs | |
| using | sophus::Rotation3F32 = Rotation3< float > |
| using | sophus::Rotation3F64 = Rotation3< double > |
| template<class TScalar > | |
| using | sophus::SO3 = Rotation3< TScalar > |
| using | sophus::SO3f = Rotation3< float > |
| using | sophus::SO3d = Rotation3< double > |
Functions | |
| template<class TScalar > | |
| auto | sophus::rotThroughPoints (UnitVector3< TScalar > const &from, UnitVector3< TScalar > const &to) -> Rotation3< TScalar > |
Construct rotation which would take unit direction vector from into to such that to = rotThroughPoints(from,to) * from. I.e. that the rotated point from is colinear with to (equal up to scale) More... | |
| template<class TScalar > | |
| auto | sophus::rotThroughPoints (Eigen::Vector< TScalar, 3 > const &from, Eigen::Vector< TScalar, 3 > const &to) -> Rotation3< TScalar > |
Construct rotation which would take direction vector from into to such that to \propto rotThroughPoints(from,to) * from. I.e. that the rotated point from is colinear with to (equal up to scale) More... | |
