plane_conv.h File Reference
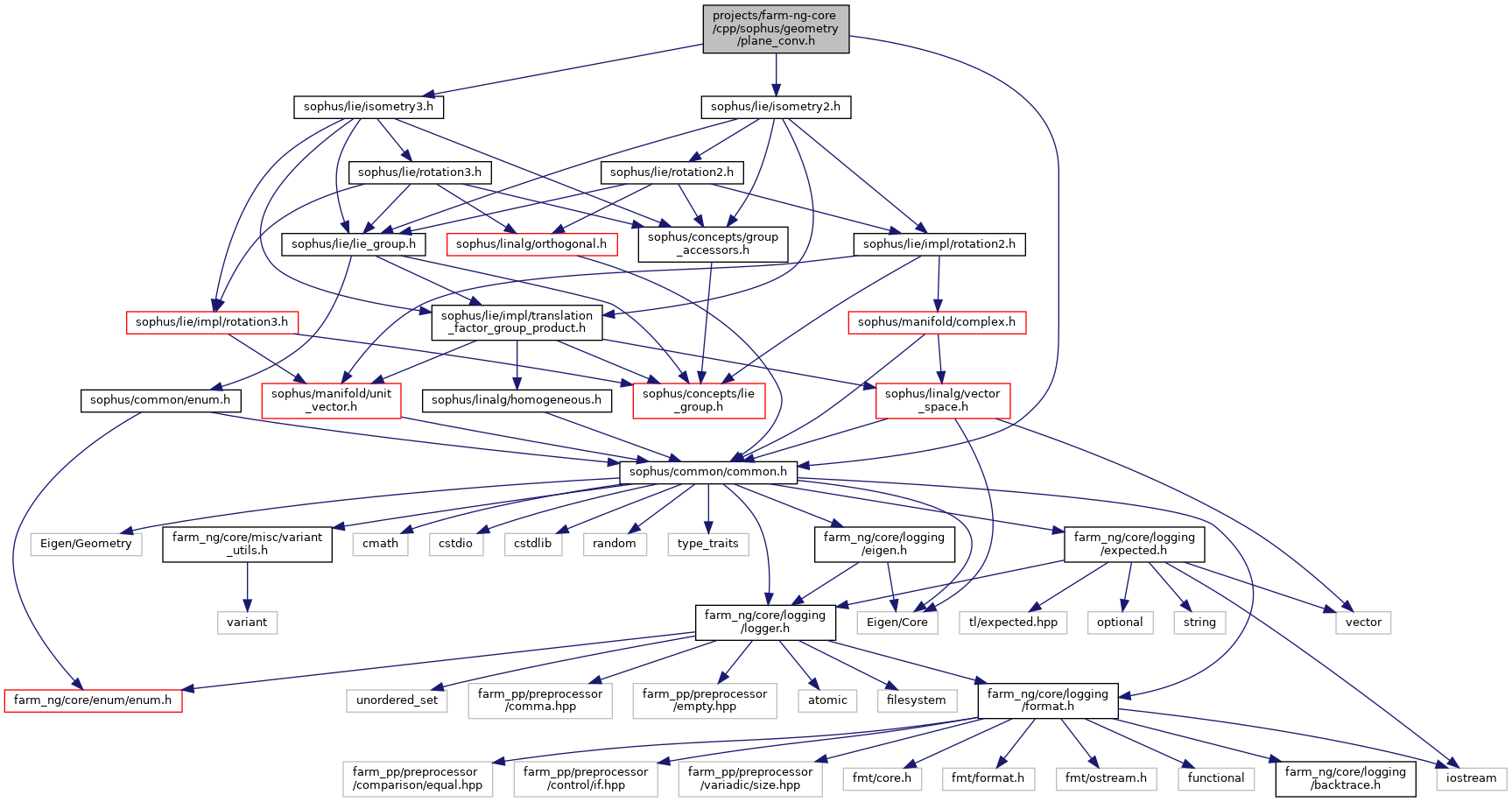
#include "sophus/common/common.h"#include "sophus/lie/isometry2.h"#include "sophus/lie/isometry3.h"
Include dependency graph for plane_conv.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| sophus | |
| Image MutImage, owning images types. | |
Functions | |
| template<class TScalar > | |
| auto | sophus::normalFromRotation2 (Rotation2< TScalar > const &foo_rotation_line) -> Eigen::Vector2< TScalar > |
Takes in a rotation foo_rotation_plane and returns the corresponding line normal along the y-axis (in reference frame foo). More... | |
| template<class TScalar > | |
| auto | sophus::rotation2FromNormal (Eigen::Vector2< TScalar > normal_in_foo) -> Rotation2< TScalar > |
Takes in line normal in reference frame foo and constructs a corresponding rotation matrix foo_rotation_line. More... | |
| template<class TScalar > | |
| auto | sophus::normalFromRotation3 (Rotation3< TScalar > const &foo_rotation_plane) -> Eigen::Vector3< TScalar > |
Takes in a rotation foo_rotation_plane and returns the corresponding plane normal along the z-axis (in reference frame foo). More... | |
| template<class TScalar > | |
| auto | sophus::rotation3FromNormal (Eigen::Vector3< TScalar > const &normal_in_foo, Eigen::Vector3< TScalar > x_dir_hint_foo=Eigen::Vector3< TScalar >(TScalar(1), TScalar(0), TScalar(0)), Eigen::Vector3< TScalar > y_dir_hint_foo=Eigen::Vector3< TScalar >(TScalar(0), TScalar(1), TScalar(0))) -> Eigen::Matrix3< TScalar > |
Takes in plane normal in reference frame foo and constructs a corresponding rotation matrix foo_rotation_plane. More... | |
| template<class TScalar > | |
| auto | sophus::rotation3FromPlane (Eigen::Vector3< TScalar > const &normal_in_foo) -> Rotation3< TScalar > |
Takes in plane normal in reference frame foo and constructs a corresponding rotation matrix foo_rotation_plane. More... | |
| template<class TScalar > | |
| auto | sophus::lineFromIsometry (Isometry2< TScalar > const &foo_from_line) -> Eigen::Hyperplane< TScalar, 2 > |
Returns a line (wrt. to frame foo), given a pose of the line in reference frame foo. More... | |
| template<class TScalar > | |
| auto | sophus::isometryFromLine (Eigen::Hyperplane< TScalar, 2 > const &line_in_foo) -> Isometry2< TScalar > |
Returns the pose T_foo_line, given a line in reference frame foo. More... | |
| template<class TScalar > | |
| auto | sophus::planeFromIsometry (Isometry3< TScalar > const &foo_from_plane) -> Eigen::Hyperplane< TScalar, 3 > |
Returns a plane (wrt. to frame foo), given a pose of the plane in reference frame foo. More... | |
| template<class TScalar > | |
| auto | sophus::isometryFromPlane (Eigen::Hyperplane< TScalar, 3 > const &plane_in_foo) -> Isometry3< TScalar > |
Returns the pose foo_from_plane, given a plane in reference frame foo. More... | |
| template<class TScalar , int kMatrixDim> | |
| auto | sophus::makeHyperplaneUnique (Eigen::Hyperplane< TScalar, kMatrixDim > const &plane) -> Eigen::Hyperplane< TScalar, kMatrixDim > |
Takes in a hyperplane and returns unique representation by ensuring that the offset is not negative. More... | |
Detailed Description
Transformations between poses and hyperplanes.
