camera_model.h File Reference
#include "sophus/common/common.h"#include "sophus/common/enum.h"#include "sophus/geometry/point_transform.h"#include "sophus/image/image.h"#include "sophus/image/image_size.h"#include "sophus/lie/se3.h"#include "sophus/linalg/homogeneous.h"#include "sophus/sensor/camera_distortion/affine.h"#include "sophus/sensor/camera_distortion/brown_conrady.h"#include "sophus/sensor/camera_distortion/kannala_brandt.h"#include "sophus/sensor/camera_projection/projection_ortho.h"#include "sophus/sensor/camera_projection/projection_z1.h"#include <Eigen/Dense>#include <numeric>#include <variant>
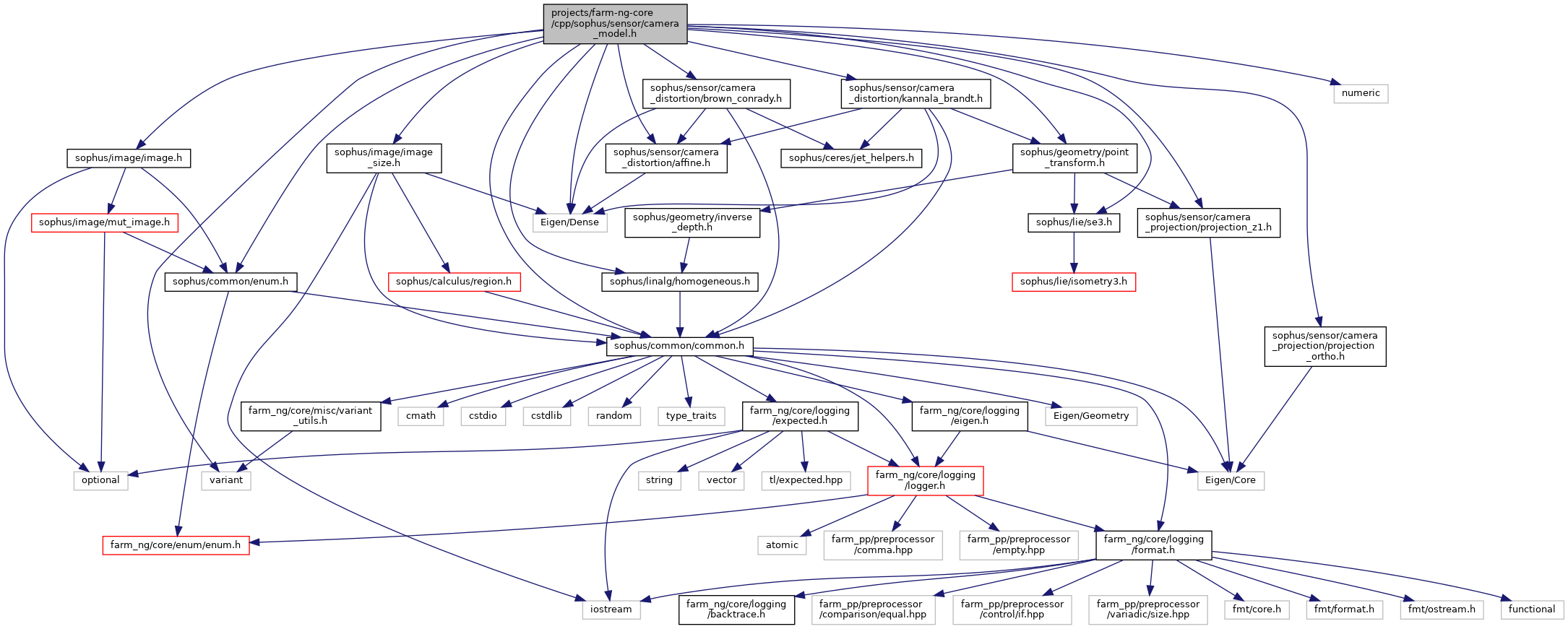
Include dependency graph for camera_model.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | sophus::CameraModelT< TScalar, TDistortion, TProj > |
| Camera model class template for pinhole-like camera projections. More... | |
| class | sophus::CameraModel |
| Concrete camera model class. More... | |
Namespaces | |
| sophus | |
| Image MutImage, owning images types. | |
Typedefs | |
| using | sophus::PinholeModel = CameraModelT< double, AffineTransform, ProjectionZ1 > |
| Pinhole camera model. More... | |
| using | sophus::BrownConradyModel = CameraModelT< double, BrownConradyTransform, ProjectionZ1 > |
| Brown Conrady camera model. More... | |
| using | sophus::KannalaBrandtK3Model = CameraModelT< double, KannalaBrandtK3Transform, ProjectionZ1 > |
| KannalaBrandt camera model with k0, k1, k2, k3. More... | |
| using | sophus::OrthographicModel = CameraModelT< double, AffineTransform, ProjectionOrtho > |
| using | sophus::CameraDistortionVariant = std::variant< PinholeModel, BrownConradyModel, KannalaBrandtK3Model, OrthographicModel > |
| Variant of camera models. More... | |
Functions | |
| template<class TScalar > | |
| auto | sophus::subsampleDown (Eigen::Matrix< TScalar, 2, 1 > const &in) -> Eigen::Matrix< TScalar, 2, 1 > |
| Subsamples pixel down, factor of 0.5. More... | |
| template<class TScalar > | |
| auto | sophus::subsampleUp (Eigen::Matrix< TScalar, 2, 1 > const &in) -> Eigen::Matrix< TScalar, 2, 1 > |
| Subsamples pixel up, factor of 2.0. More... | |
| template<class TScalar > | |
| auto | sophus::binDown (Eigen::Matrix< TScalar, 2, 1 > const &in) -> Eigen::Matrix< TScalar, 2, 1 > |
| Bins pixel down, factor of 0.5. More... | |
| template<class TScalar > | |
| auto | sophus::binUp (Eigen::Matrix< TScalar, 2, 1 > const &in) -> Eigen::Matrix< TScalar, 2, 1 > |
| Bins pixel up, factor of 2.0. More... | |
| sophus::SOPHUS_ENUM (CameraDistortionType,(pinhole, brown_conrady, kannala_brandt_k3, orthographic)) | |
| Camera model projection type. More... | |
| auto | sophus::createDefaultPinholeModel (ImageSize image_size) -> PinholeModel |
Creates default pinhole model from image_size. More... | |
| auto | sophus::createDefaultOrthoModel (ImageSize image_size) -> OrthographicModel |
Creates default orthographic model from image_size. More... | |
